ミリ波レーダー解析ソフト「WaveFarer」で実施する
ターゲット推定
~屋外シナリオの諸元の変化による推定精度の検証~
WaveFarerによる検証
シミュレーション環境
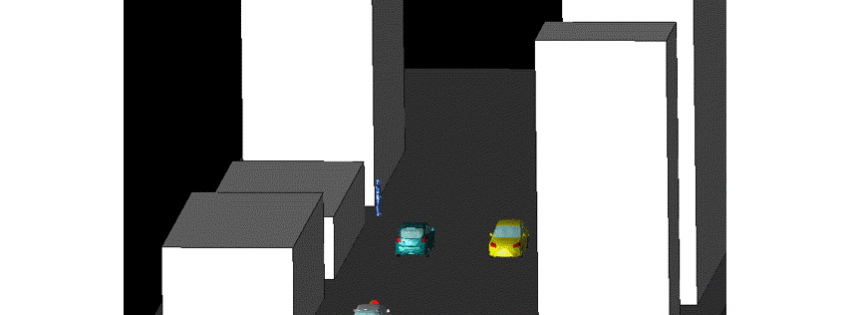
まず、WaveFarerにて、図1のような屋外における自動車レーダーのシナリオを作成してみました。
レーダーを搭載した自動車(白色)、前方の車(青緑色)、対向車線の車(黄色)を設置し、道路上を走行させています。道路の横には高さをランダムにした箱状の建物を複数設置し、マルチパス環境となるようにしてみました。
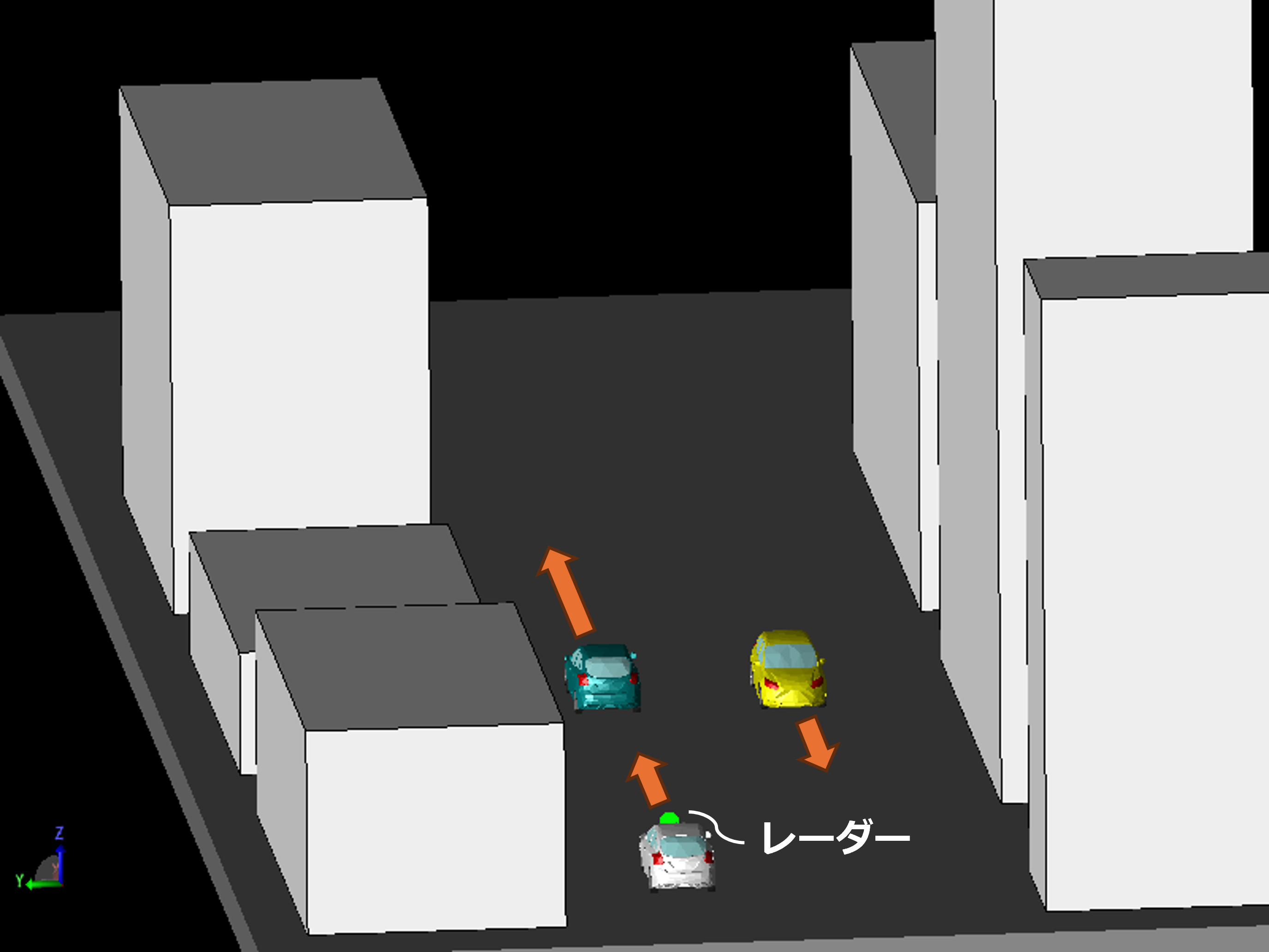
図1:シミュレーション環境
レーダーの構成
レーダーについて図2に示します。
図2のように、白色の自動車の先頭部分に設置し、79 GHz〜81 GHzのFMCW方式によって検知します。ターゲットの角度推定のためには送信アンテナと受信アンテナがそれぞれ複数必要なので、送信アンテナ5個、受信アンテナ5個で設定しました。受信アンテナ間隔は、素子同士が異なる位相で電波を受信して角度検知の精度を高められるよう、概ね半波長程度としています。
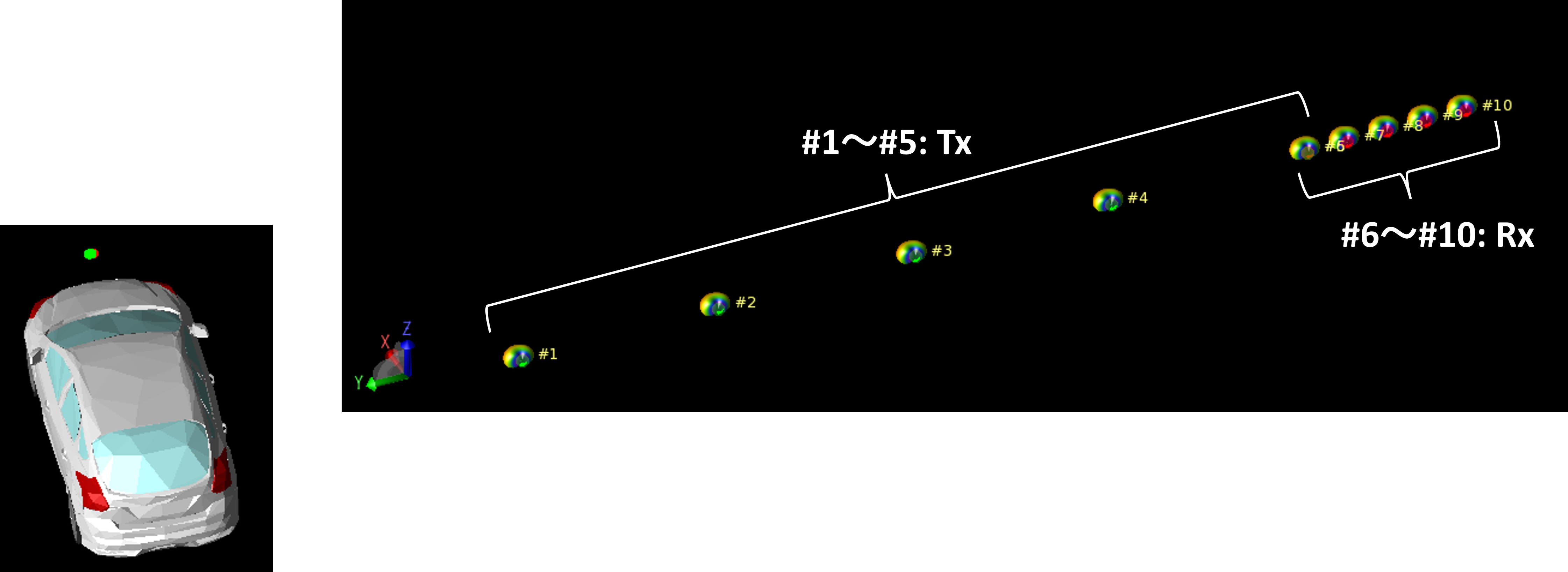
図2:送信アンテナと受信アンテナ
シミュレーションシナリオ
レーダーについて図2に示します。
図2のように、白色の自動車の先頭部分に設置し、79 GHz〜81 GHzのFMCW方式によって検知します。ターゲットの角度推定のためには送信アンテナと受信アンテナがそれぞれ複数必要なので、送信アンテナ5個、受信アンテナ5個で設定しました。
受信アンテナ間隔は、素子同士が異なる位相で電波を受信して角度検知の精度を高められるよう、概ね半波長程度としています。
図3:屋外シナリオのアニメーション
今回は、建物や道路、その他障害物がレーダーの検知結果にどの程度影響を与えるかを検証するため、図4に示す4つのケースでシミュレーションを実施しました。
こちらのように段階を踏んでシミュレーションを実施することで、影響の切り分けが可能となります。
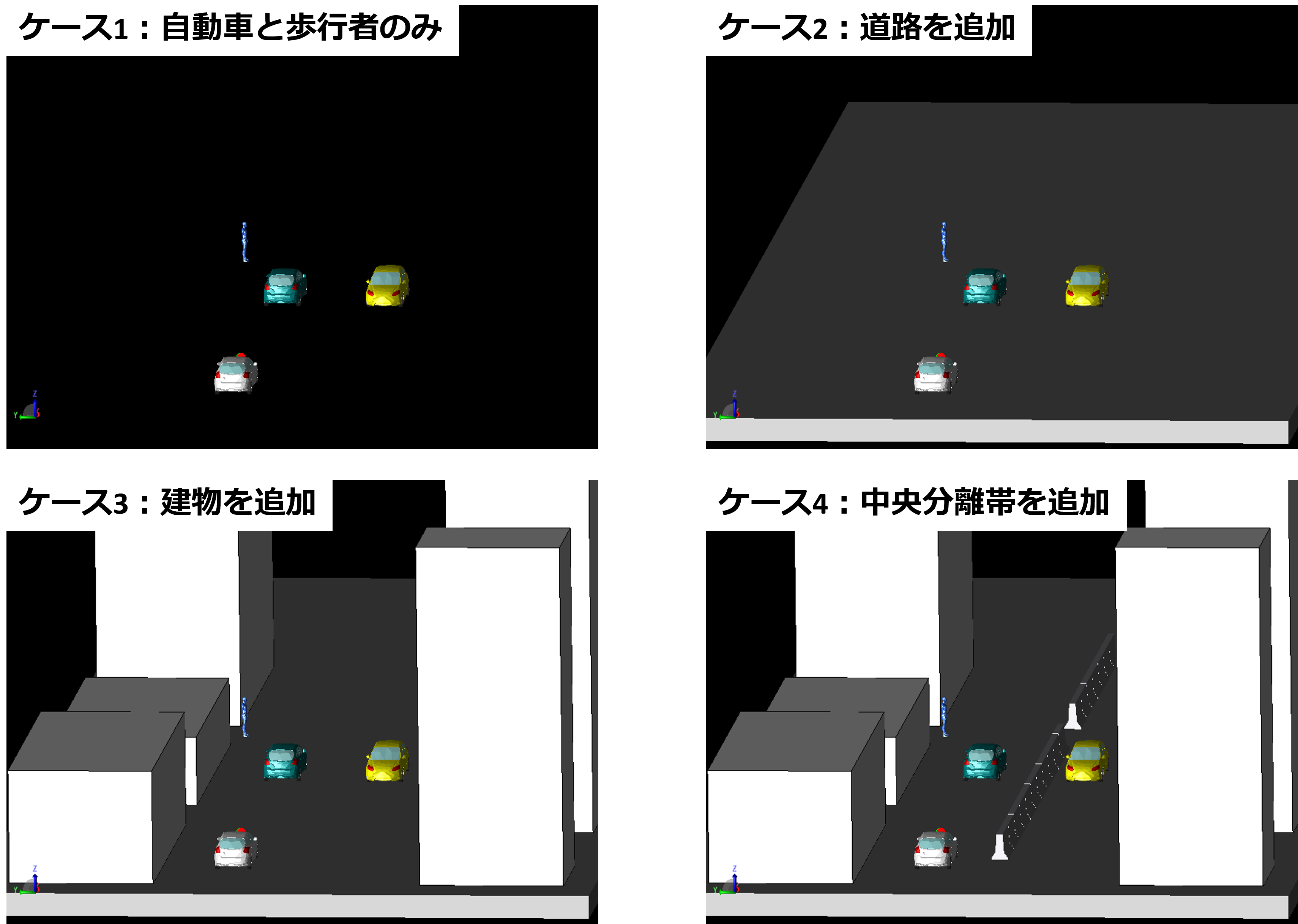
図4:計算ケース
シミュレーション結果の比較
対象物の距離と速度を検知するレンジドップラープロットの結果と、距離と角度を検知するレンジアングルプロットの結果を紹介します。
なお、レンジドップラープロット出力機能はWaveFarerに標準搭載されています。レンジアングルプロットは、送信5素子 x 受信5素子 = 25素子分のレンジドップラープロットの結果を後処理することで結果を出力しています。
ケース1とケース2の比較
まず、ケース1(自動車、人体のみ)とケース2(道路)を比べてみた図を図5に示します。図5では、殆ど同じような結果に見え、前方の車、対向車、歩行者を検知できていることがわかります。
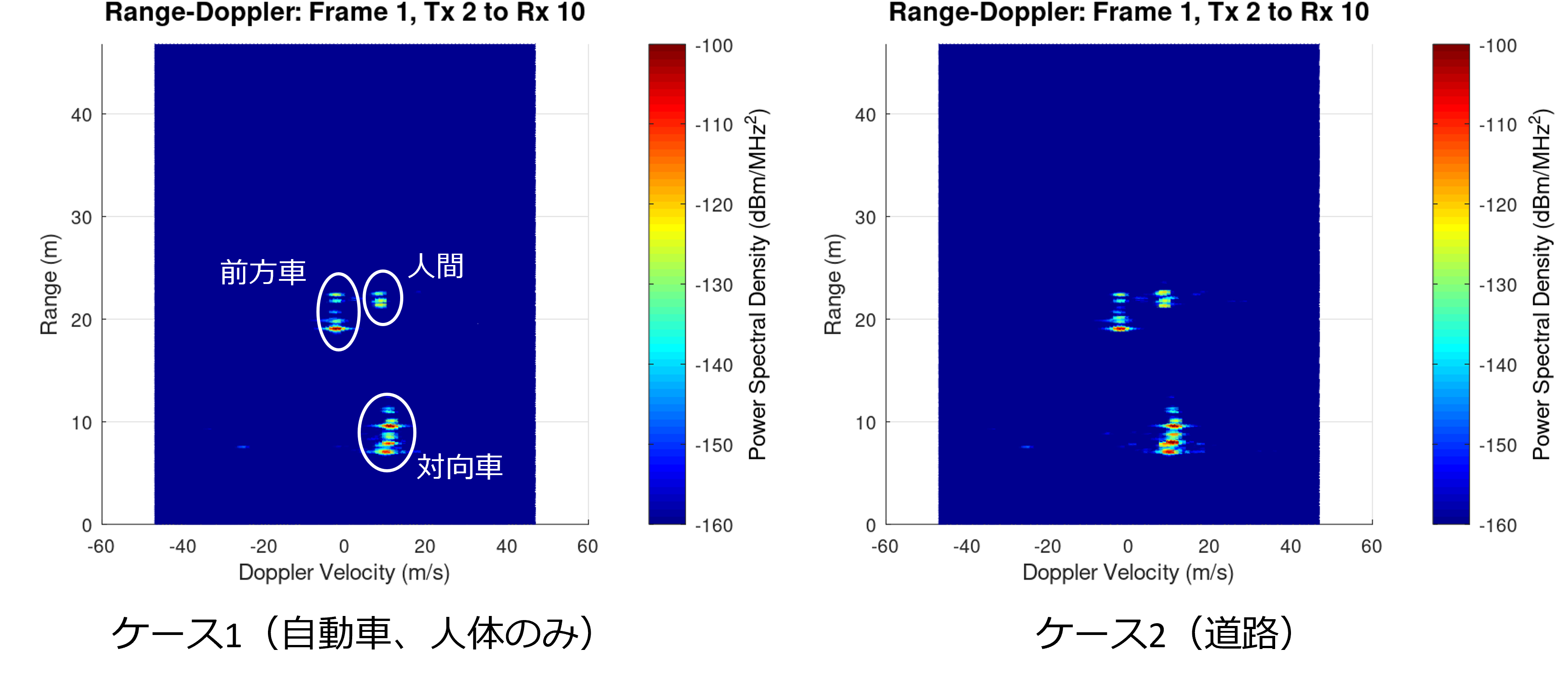
図5:ケース1とケース2のレンジドップラープロットの比較(横軸:相対速度、縦軸:ターゲット距離)
次に、WavFarerが探索した伝搬パスとCIR(Complex Impulse Response、横軸:時間、縦軸:受信電力ですが、)を比較した図を図6に示します。
ケース2では道路を追加しているため、路面を反射した伝搬パスが見つかることがありました。
図6右側のCIRはグラフの形についてはあまり変化がないことがわかりました。路面反射パスはあるものの、伝搬パスを俯瞰したときには大差はなく、レンジドップラープロットも大きくは変化しなかったことが推察されます。
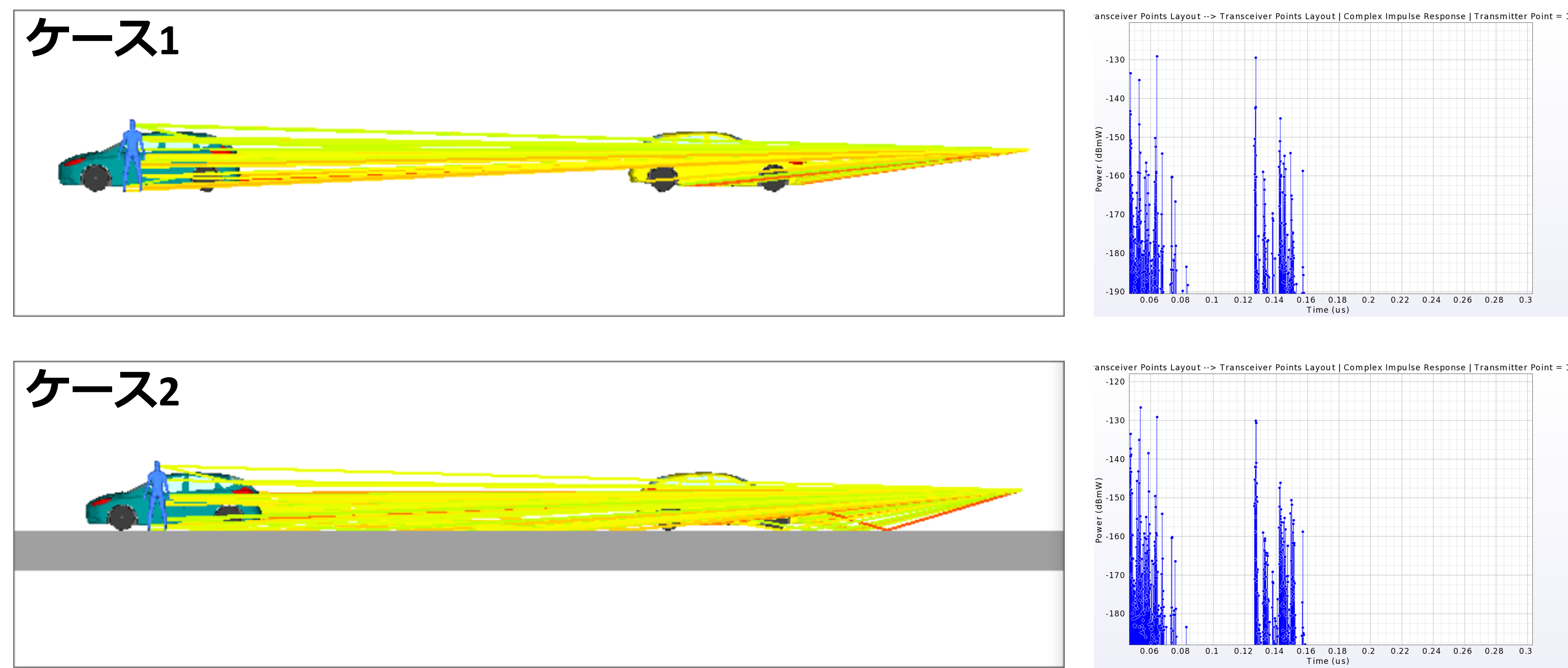
図6:路面反射パス
時刻0秒から3秒までアニメーション表示(図7上半分)させてみると、どちらのケースでも前方車、対向車、人間を概ね分離して検知できていることが確認できます。
また、レンジアングルプロットを確認した場合(図7下半分)でも、対向車の角度を概ね正確であることがわかります。
少し見づらいですが、下半分のグラフからは歩行者が左遠方から右近傍に移動している像が確認でき、人体モデルの角度検知を含めてできていることがわかります。
この検証から、周囲の障害物や建物等の多くのマルチパスを生み出す環境でない場合は、概ねターゲットを正確に捕捉できていることがわかりました。
図7:ケース1(左)とケース2の結果のアニメーション
ケース2とケース3の比較
次に、ケース2(道路)とケース3(道路+建物)を比べた結果を図8に示します。
建物モデルが追加されたケース3では、ケース2と同様に3つの動的なターゲットがありそうであることは確認できますが、像がレンジ方向に延びていることが確認できました。
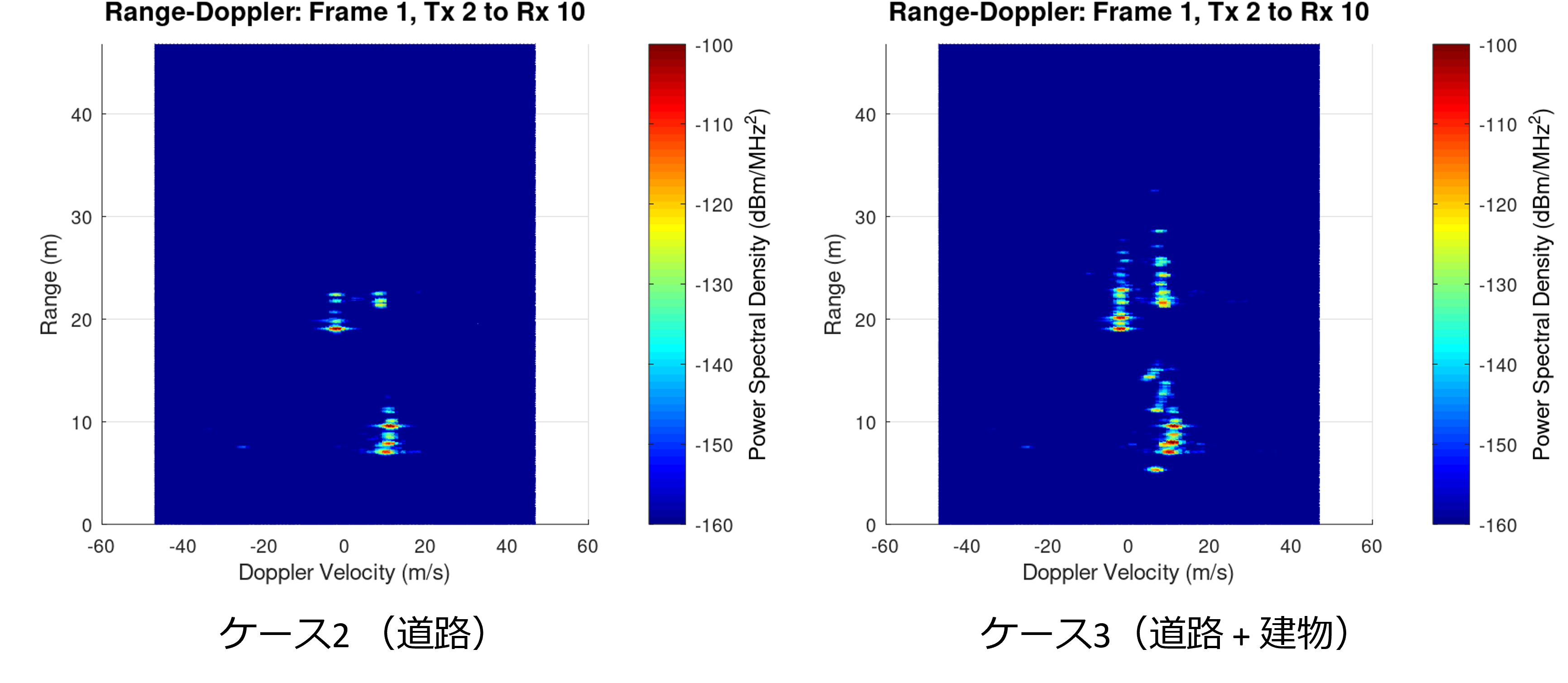
図8:ケース2とケース3のレンジドップラープロットの比較
こちらについて伝搬パスを確認してみた(図9)ところ、ターゲットを捉えてはいますが、建物を介するパスが増えたため、ケース1や2に比べて伝搬パスの距離が長くなっていることがわかります。
特に、図9右側のCIRを比較してみると顕著に差分があることが確認できます。
伝搬パスが長くなることで、ターゲットに直接当たって返って来たパスに比べ到来時間が遅くなり、レーダーが検知するターゲット位置が本来の位置より遠くなります。
このことから、環境状況を反映したシミュレーション結果を出すためには、屋内の場合は壁、床、天井、屋外の場合は建物等の周辺構造物のモデリングしてあげることがが非常に大事であることがわかります。
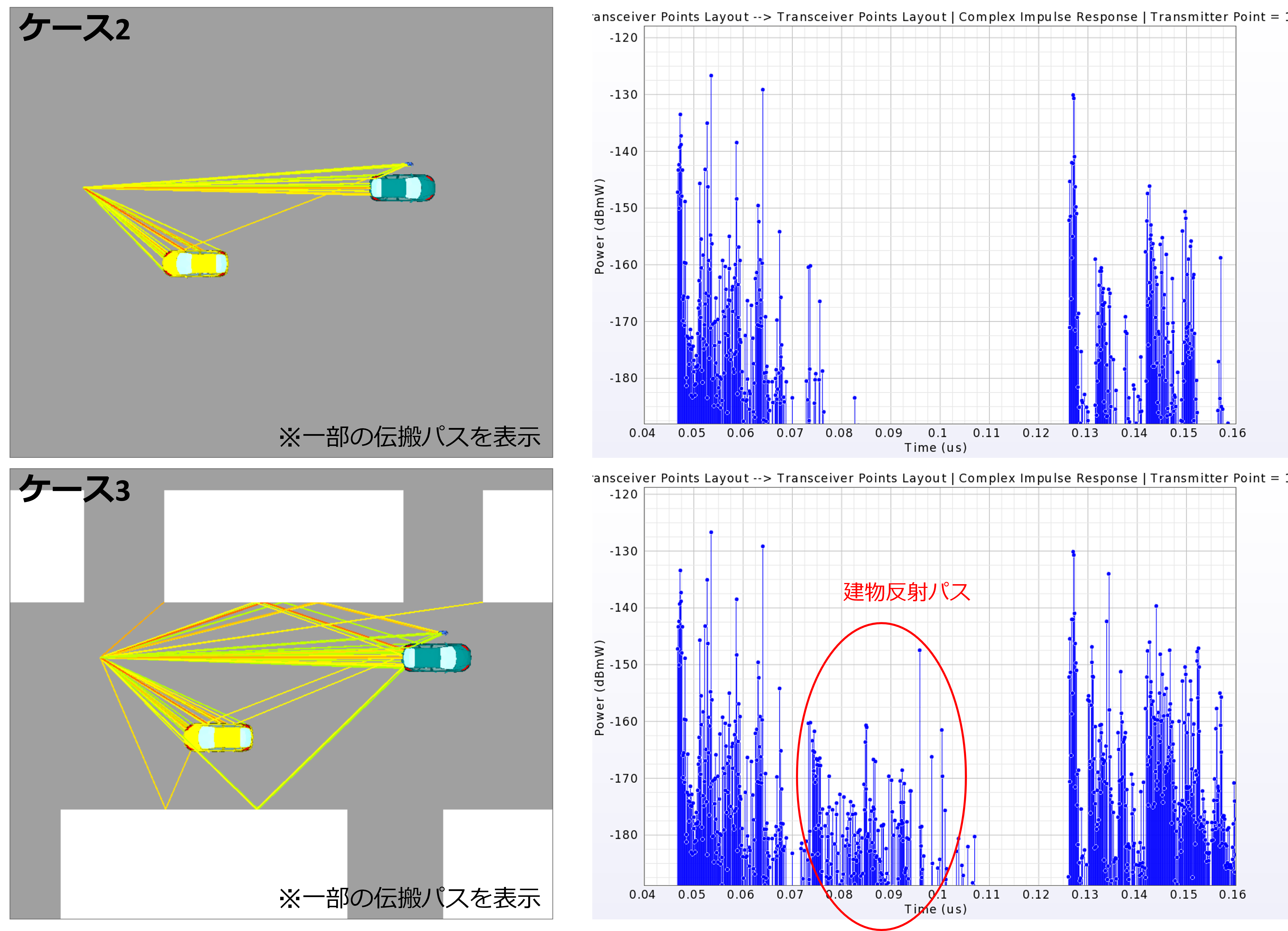
図9:建物反射パス
ケース3とケース4の比較
最後にケース3(道路+建物)とケース4(道路+建物+中央分離帯)を比べた結果を図10に示します。
中央分離帯を入れたケース4では、特に対向車線の車を正確に検知できていないことが画像から分かります。
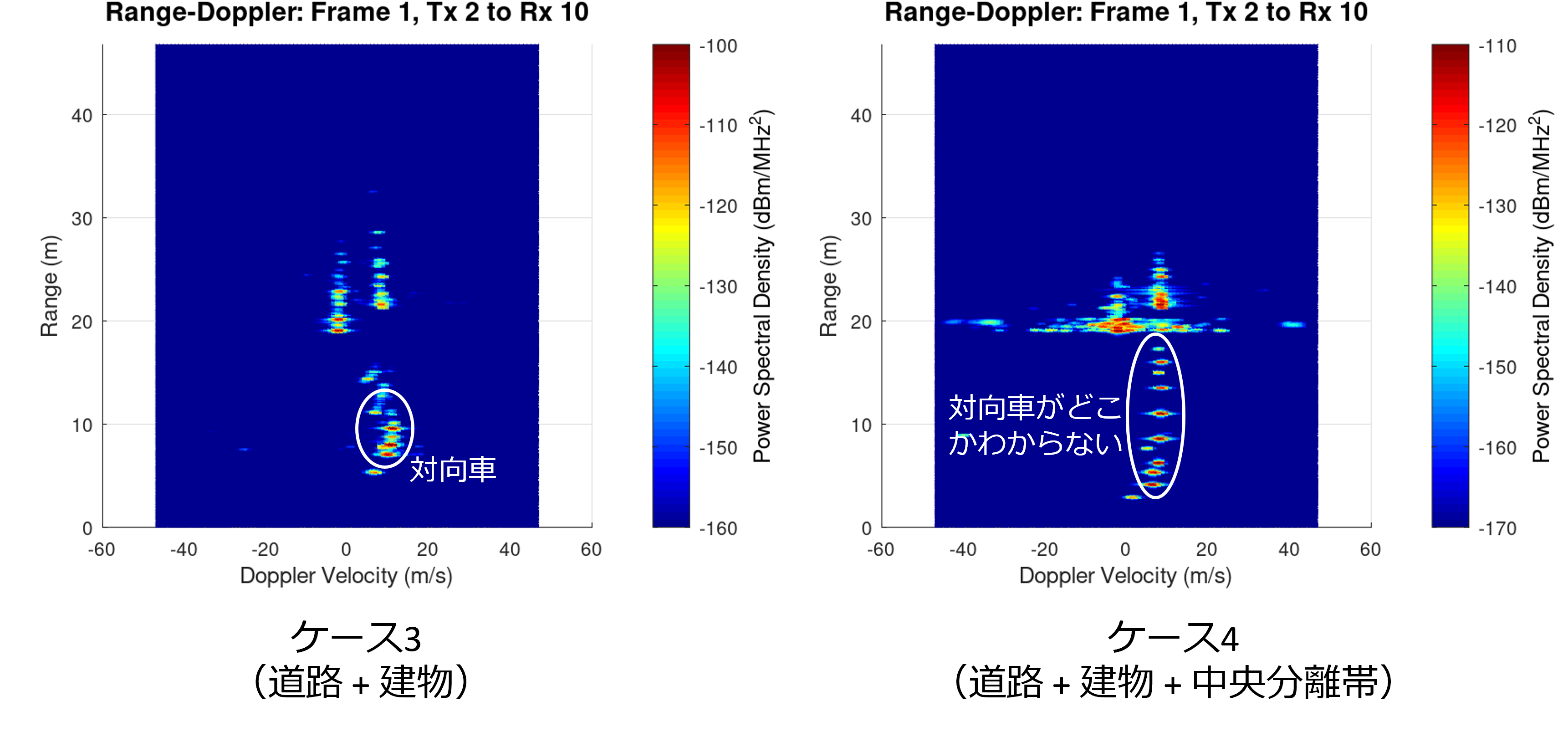
図10:ケース3とケース4のレンジドップラープロットの比較
ケース3とケース4の伝搬パス及びCIRを比較した図を図11に示します。ケース4の伝搬パスを見ると、中央分離帯により遮られることで黄色い対向車に電波が当たりづらくなっていることが確認できます。
CIRを比較しても赤丸の部分のパスが顕著に異なることが確認されました。
一部の伝搬パスは対向車に当たっているため、レンジドップラープロットの結果として検知されてはいますが、はっきりと対向車を検知できていないことが結果から分かります。
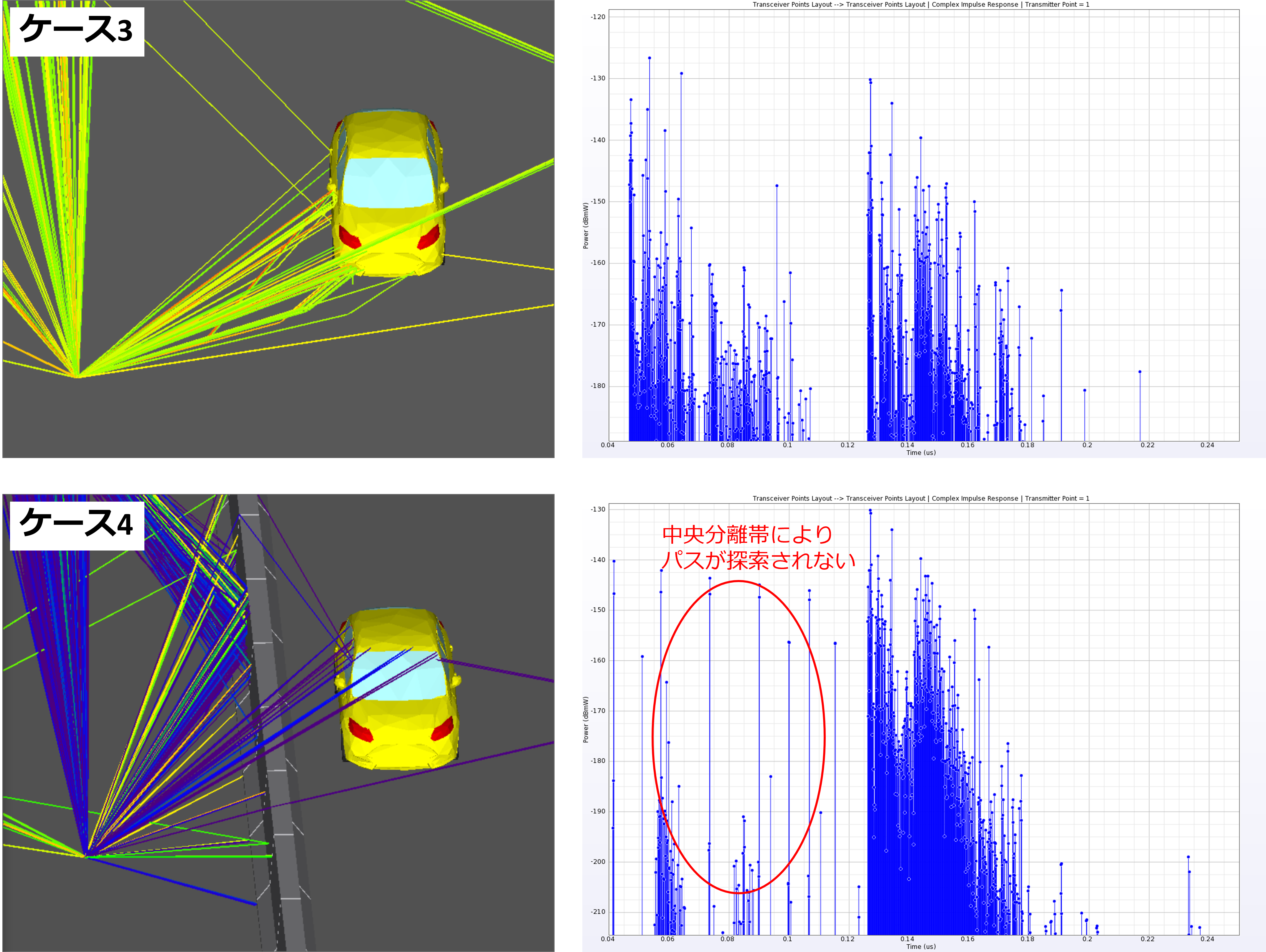
図11:ケース3とケース4の伝搬パスの比較
結果のアニメーション
最後に、図12及び図13に4種類のケースにおけるレンジドップラーとレンジアングルプロットをアニメーションで示します。
解析モデルを少しずつ変更することで、信号処理結果の微妙な違いをシミュレーションで確認することが可能です。
図12:レンジドップラープロットのアニメーション
図13:レンジアングルプロットのアニメーション
おわりに
今回のコラムでは、WaveFarerによるターゲットの推定について、レンジドップラープロットとレンジアングルプロットの両方を紹介してみました。
検証の結果から、モデルを徐々に足していくことで、レーダーの信号処理の結果がどのように変化するかを確認することができました。
WaveFarerは結果を信号処理してレンジドップラープロットを出力するだけではなく、伝搬パス等を確認することで結果に対する考察も可能ですので、センサ設計や実際に導入した場合の確認等に役立てられると思っています。
ここまでご覧いただき、ありがとうございます。弊社のコラム記事では、こちらのようなレーダーのみならず、電波及び通信分野に関する様々な記事が掲載されておりますので、ご興味ありましたら是非ご覧ください。
