ミリ波レーダー解析ソフト「WaveFarer」で実施する
ターゲット推定
~FMCWレーダーの概要~

FMCWレーダーについて
FMCWとは「Frequency Modulated Continuous Wave」の略で、日本語では「周波数変調連続波」となります。FMCWは、CW信号に周波数変調を施した送信信号を用いるレーダーです。
CW信号の場合はある周波数の連続波を一定期間Tにわたって送信するレーダを指すのですが、FMCW信号の場合はCW信号が周波数変調されて送信されます。
FMCW方式における周波数変調は、時刻の変化に応じて周波数が高くなるように変調を行った電波を送信する方式です。この変調を行った送信信号をチャープ信号と呼びます。
FMCWレーダー方式の模式図を図1に示します。また、チャープ信号の時刻に対する周波数の変化を図1の右上に示します。
まず、生成されたチャープ信号が送信アンテナ(Tx)より送信されます。Txから送信された電波がターゲットに当たった後、受信アンテナ(Rx)が受信します。受信信号は、送信信号であるチャープ信号と合成され、IF信号が生成されます。IF信号がADC(アナログデジタル変換)を通じてDSP(デジタル信号処理)がなされ、ターゲットの位置や速度等の情報を取得します。
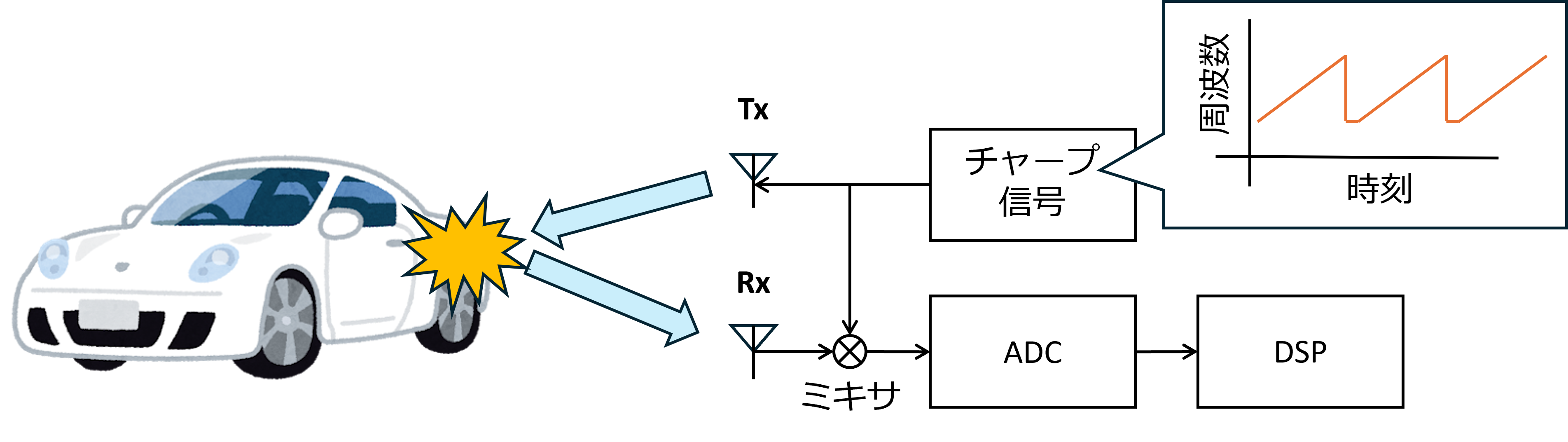
図1 FMCWレーダー方式の模式図
FMCWレーダーによる検知
上記までで、FMCWレーダー方式はチャープ信号を使って受信信号を上手く処理することで検知をするレーダーだということまでは分かったかと思います。
続いて、速度検知や距離検知等に関するFMCWのスペックはどのように決まるのか?という点について紹介したいと思います。
距離検知
距離の情報はミキサによって出力されるIF信号の周波数から取得することできます。図2にFMCWの距離検知の概念図を示します。
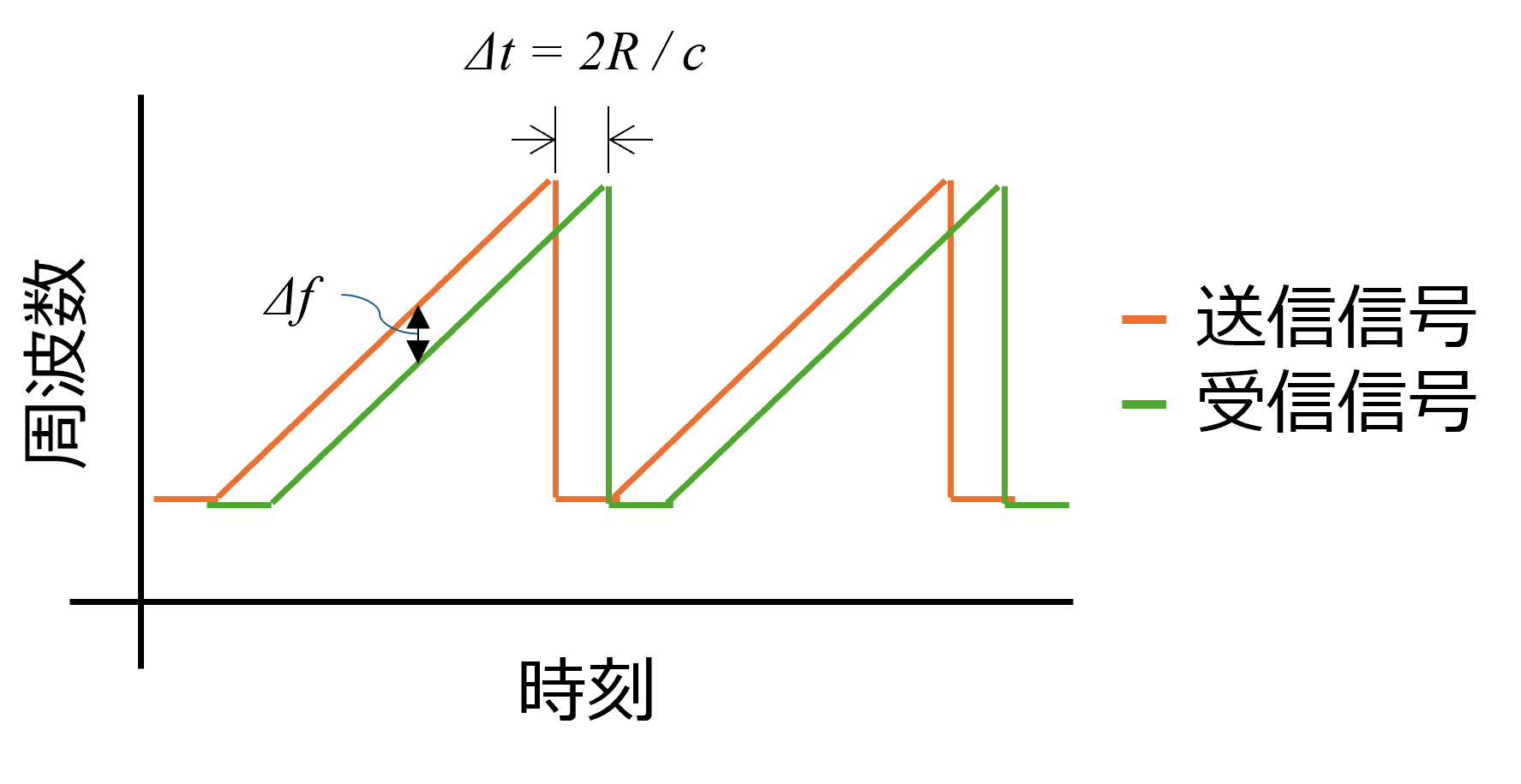
図2 FMCWの距離検知の概念図
図2のオレンジの線は送信信号を、緑の線は受信信号を指します。ターゲットからの反射波は送信波と同様の波形をしていますが、ターゲットまでの距離に比例した往復分の時間Δtだけ遅れます。距離をR、光速をcとすると、以下の式が成り立ちます。
$$ \Delta t = \frac{2R}{c} $$
この式は、「Tx~ターゲット」「ターゲット~Rx」の往復分の距離「2R」を考慮して、その距離を光速で割ることで算出されます。
図2はレーダーが検出するターゲットが1つであった場合の受信信号の例ですが、ターゲットが複数ある場合は、ターゲット毎にレーダーからターゲットまでの距離が異なりますので、様々な遅延時間の受信信号が検出されます。
続いて、図3に複数のターゲットが存在する場合における、FMCWの送受信信号とIF信号の関係を示します。図3は2種類のターゲットが存在しているため、距離の分遅延時間が生じた上、受信信号が2つ観測されています。
図3の下部にはある時刻におけるIF信号をプロットしています。ターゲットが2つあるので、2種類の周波数におけるIF信号が確認されています。これらを合成したものが最終的なIF信号となります。
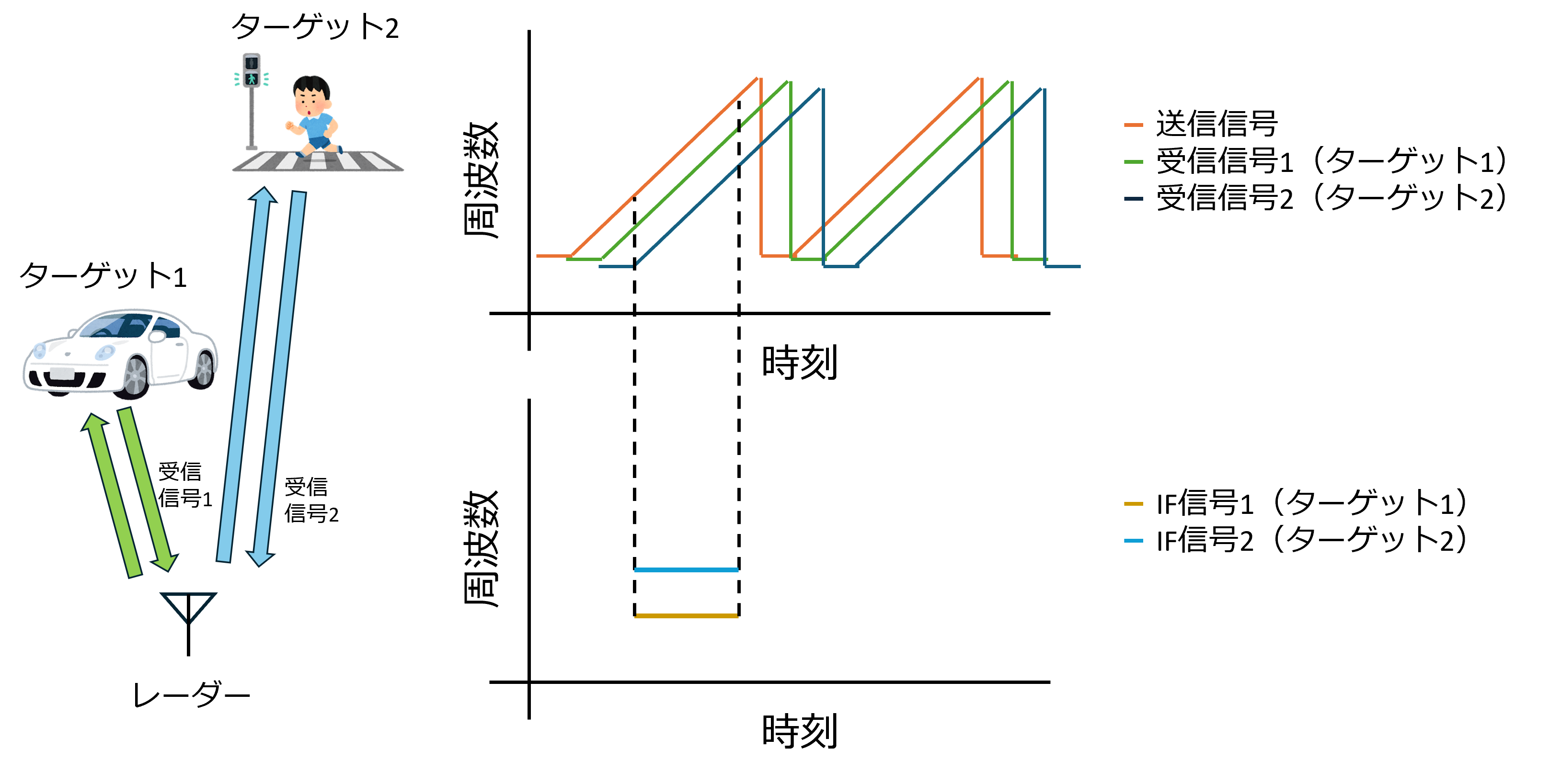
図3 FMCWの送受信信号(上)とIF信号(下)
レーダーシステムの距離検知では、最終的なIF信号をAD変換した後、フーリエ変換(FFT)を行うことで2種類の周波数スペクトルを確認し、ターゲットの距離情報を取得します。
このときのFFTをレンジFFTと呼びます。
速度検知
レーダーの検知対象のターゲットはその場に留まっている場合もあれば移動している場合も考えられます。
そのため、ターゲットの速度を検知することも、レーダーシステムの非常に重要な役割となります。
速度を検知するためには、FMCWレーダーにおける2つのチャープ信号を用いる必要があります。
図4のように、時刻Tcの間隔で送信される2つのチャープ信号を想定します。速度は、2つのチャープ信号から取得できるIF信号の位相差を用いて計算することができます。
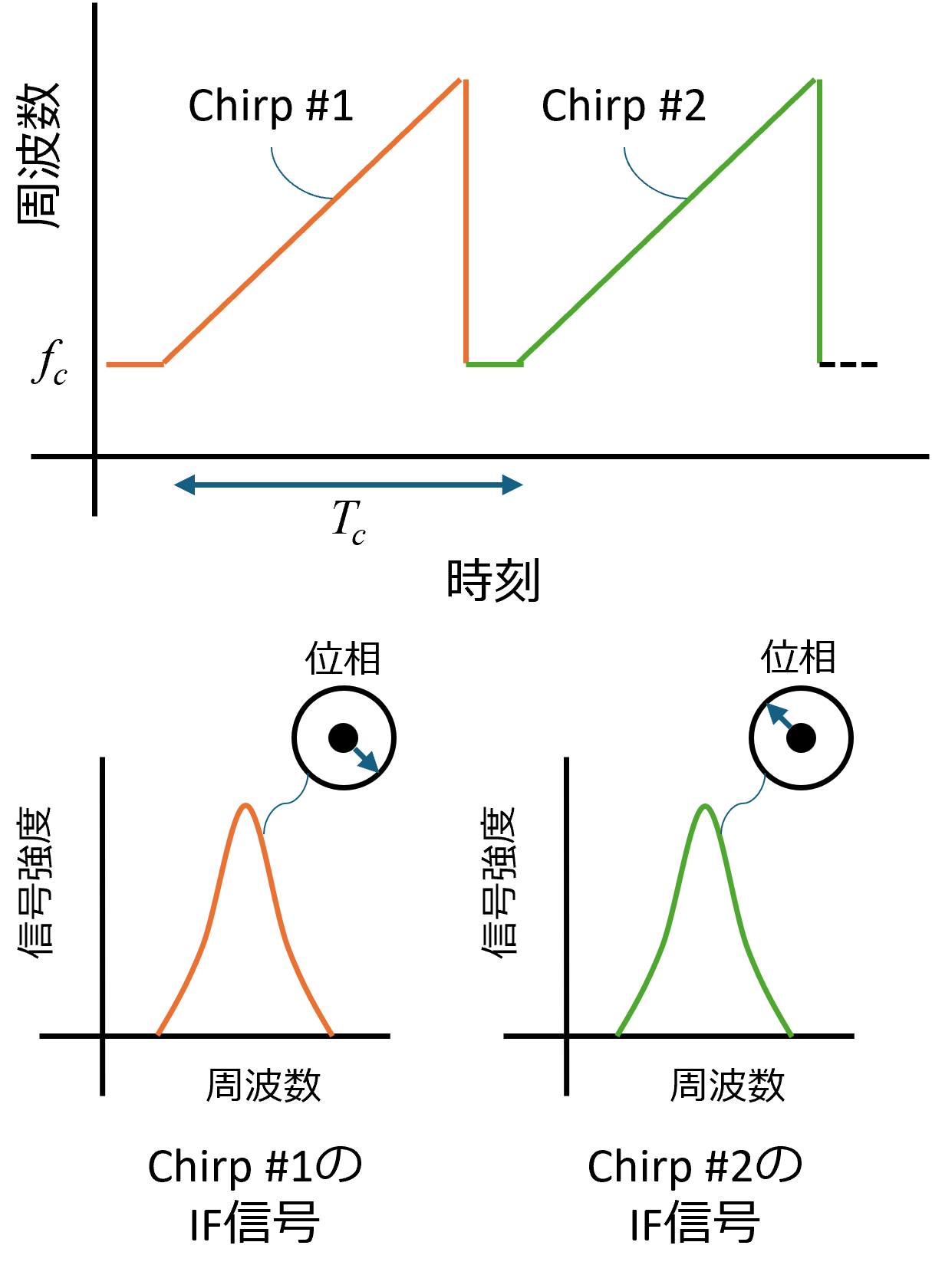
図4 2つのチャープ信号によるIF信号の位相差
例えば、ターゲットがレーダーから遠ざかり、Chirp #1が受信する信号よりも、Chirp #2が受信する信号がΔτだけ遅くなると仮定します。
その時、Chirp #1と#2のIF信号同士の位相差Δφは以下で表されます。
※λ:波長、v:レーダーに対する相対速度
$$
\Delta\phi = 2\pi f_c \Delta\tau = \frac{4\pi v T_c}{\lambda}
$$
上記の式を用いて、vを以下のように導出することができます。
$$
v = \frac{\lambda \Delta\phi}{4\pi T_c}
$$
なお、位相差Δφの絶対値がπより大きい値になると、位相が進んでいるのか遅れているのかわからなくなるため、Δφの絶対値はπ以下であることが必要です。
複数のターゲットが異なる速度で移動している場合においても、複数のチャープ信号を用いることで速度検知が可能です。
1フレーム中にチャープ信号がN本あるとすると、Rxが受信するIF信号の位相はN回変化します。
レンジFFTの結果に対し、更にFFTを実施することにより、図5のようにターゲットの速度を求めること
ができます。位相変化のデータをFFTすることで、角周波数を求めることができ、複数のターゲットの速度として分離することが可能です。このときのFFTをドップラーFFTと呼びます。
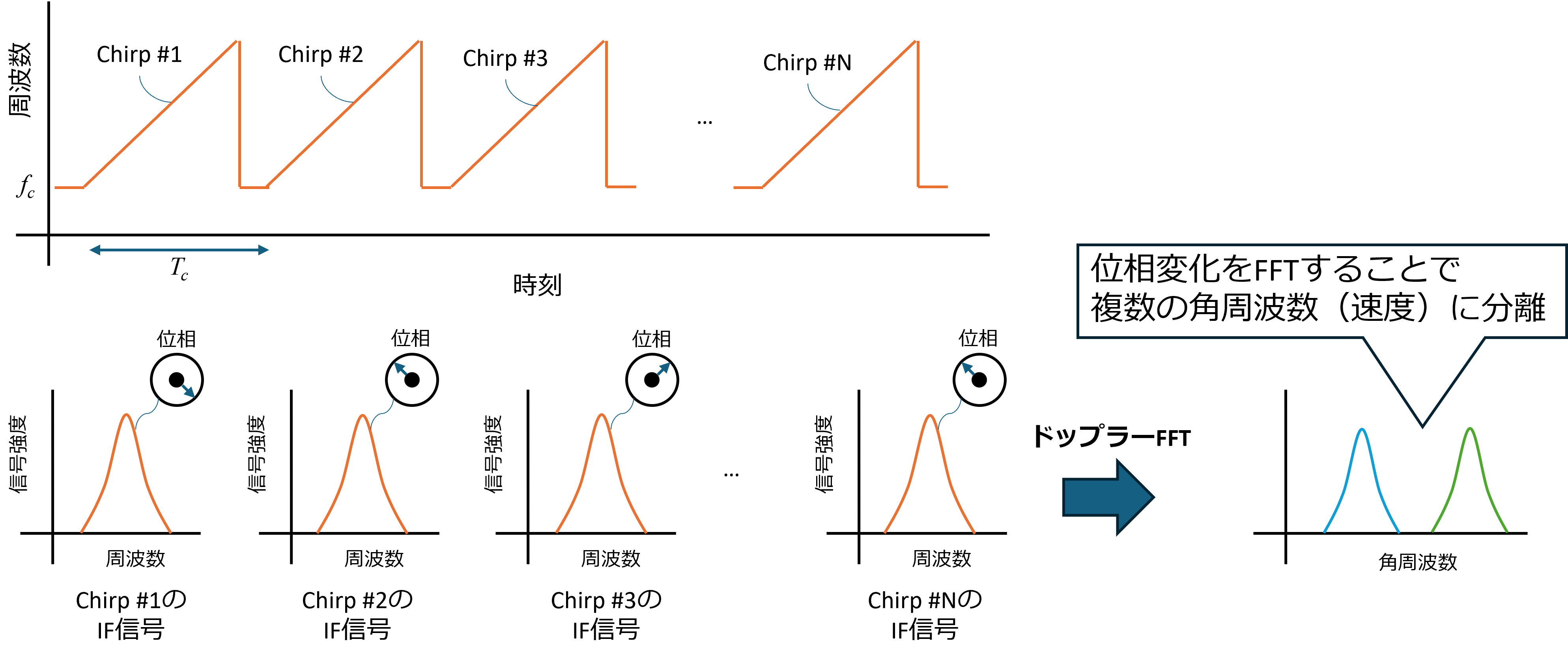
図5 ドップラーFFTの概念図
おわりに
今回のコラムでは、WaveFarerにてターゲットの推定を実施するために必要な、FMCWレーダーの概要と、その距離検知・速度検知について紹介しました。
次の記事では、ターゲットの角度検知について紹介したいと思います。
ここまでご覧いただき、ありがとうございます。

参考文献
[1] 吉田考、改訂 レーダ技術、(社)電子情報通信学会
[2] 梶原昭博、ミリ波レーダ技術と設計-車載用レーダやセンサ技術への応用-、科学情報出版株式会社