自動車衝突防止ミリ波レーダーシミュレーション事例
シミュレーション条件
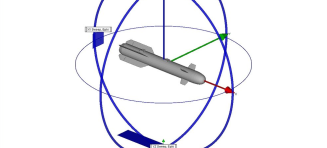
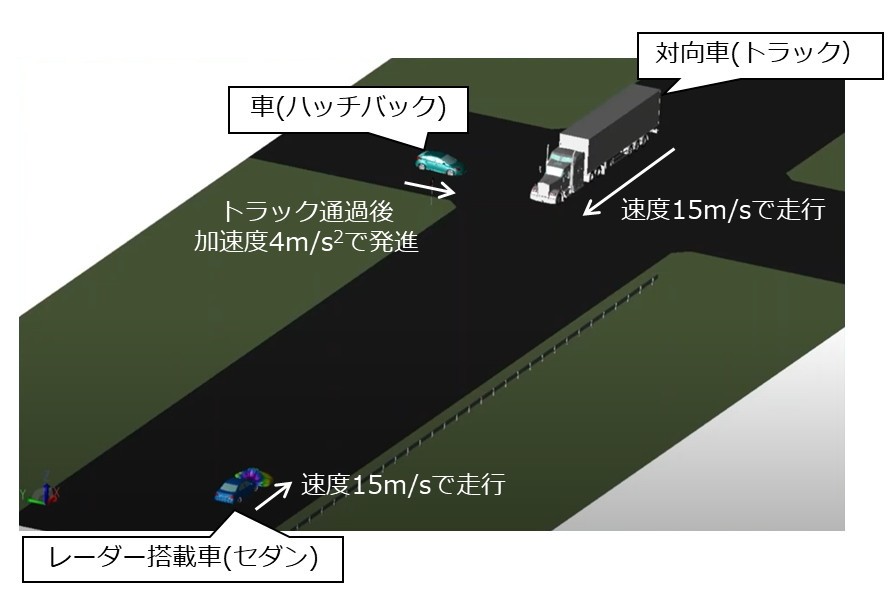
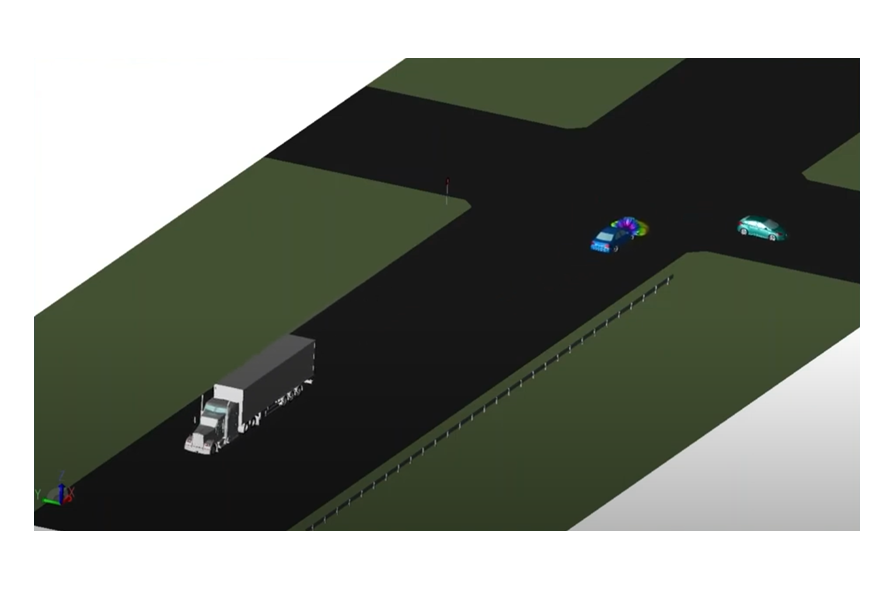
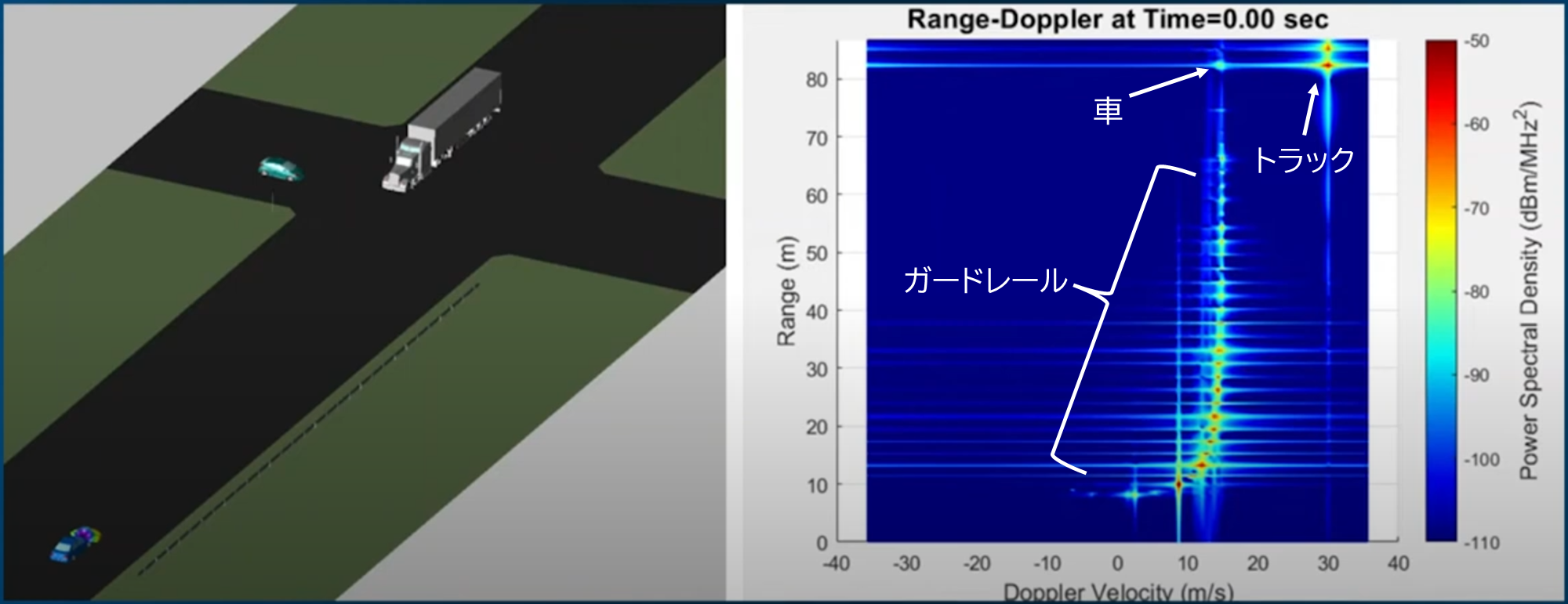
- 下図にシミュレーションシナリオを示す。初期時刻(0秒)では、レーダー搭載車(セダン)及び対向車(トラック)が速度15m/sで走行しており、交差点に車(ハッチバック)が一時停止している。車(ハッチバック)はトラック通過後に加速度4m/s2で発進する。各車両は初期時刻から6秒後まで移動する。
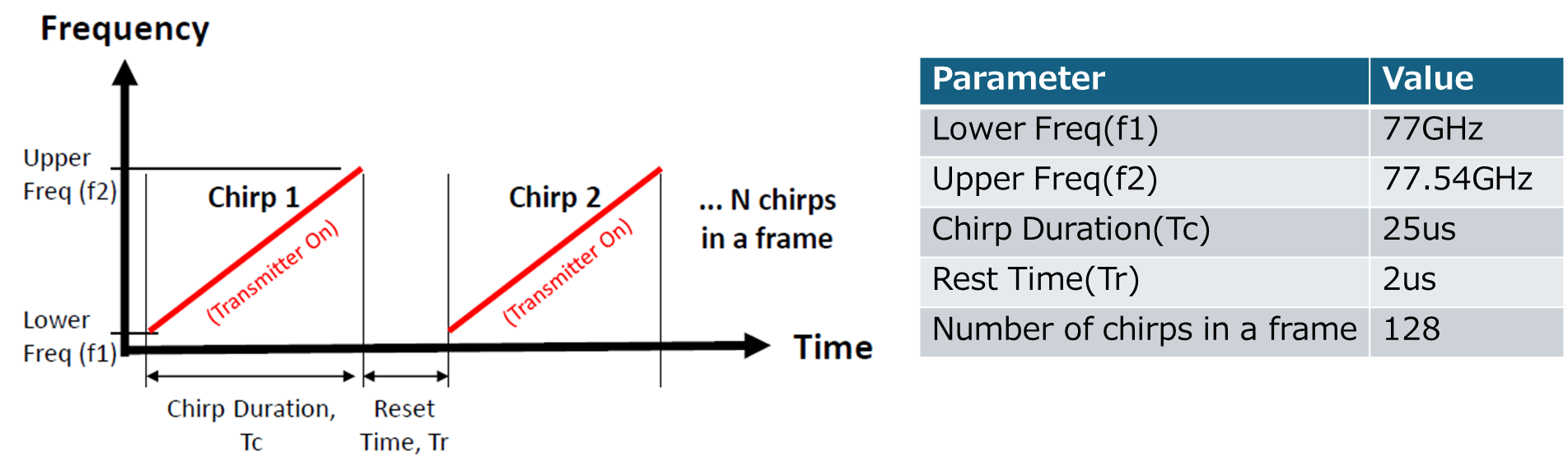
- 以下のFMCWチャープ信号のパラメータを設定する。
距離・相対速度検出結果
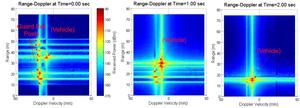
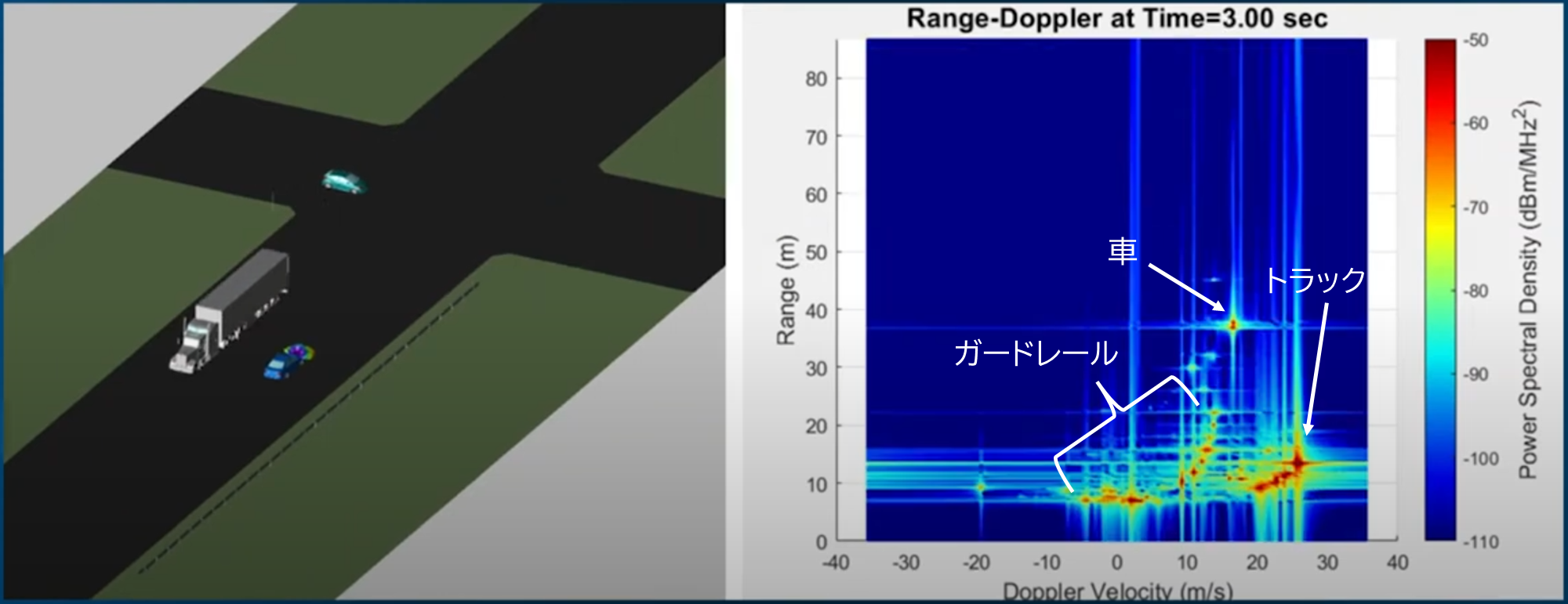
- 下図に初期時刻(0秒)と3秒後のレンジ・ドップラープロットを示す。各時刻における対向車(トラック)、車(ハッチバック)、ガードレールまでの距離と相対速度が検出できている。
道路の拡散散乱によるクラッタの影響
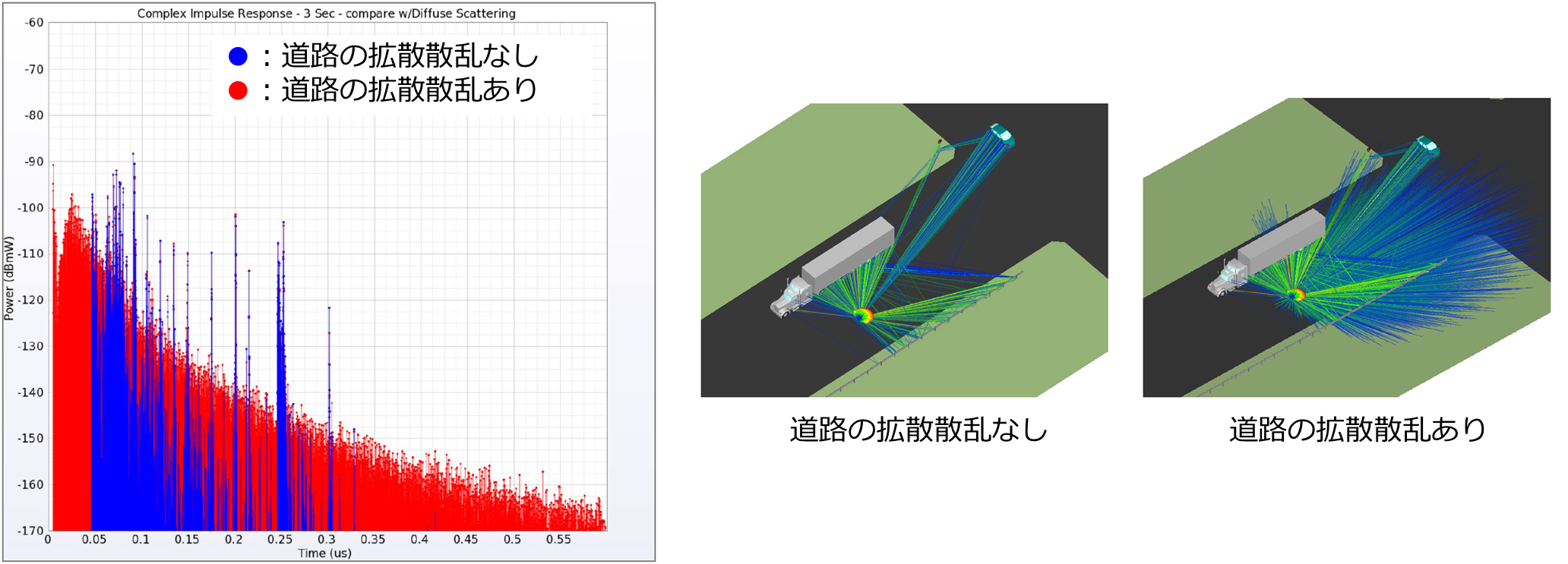
- 自動車レーダー受信信号へのクラッタ(不要な電波)の原因の一つに道路や地面の粗さによる拡散散乱がある。
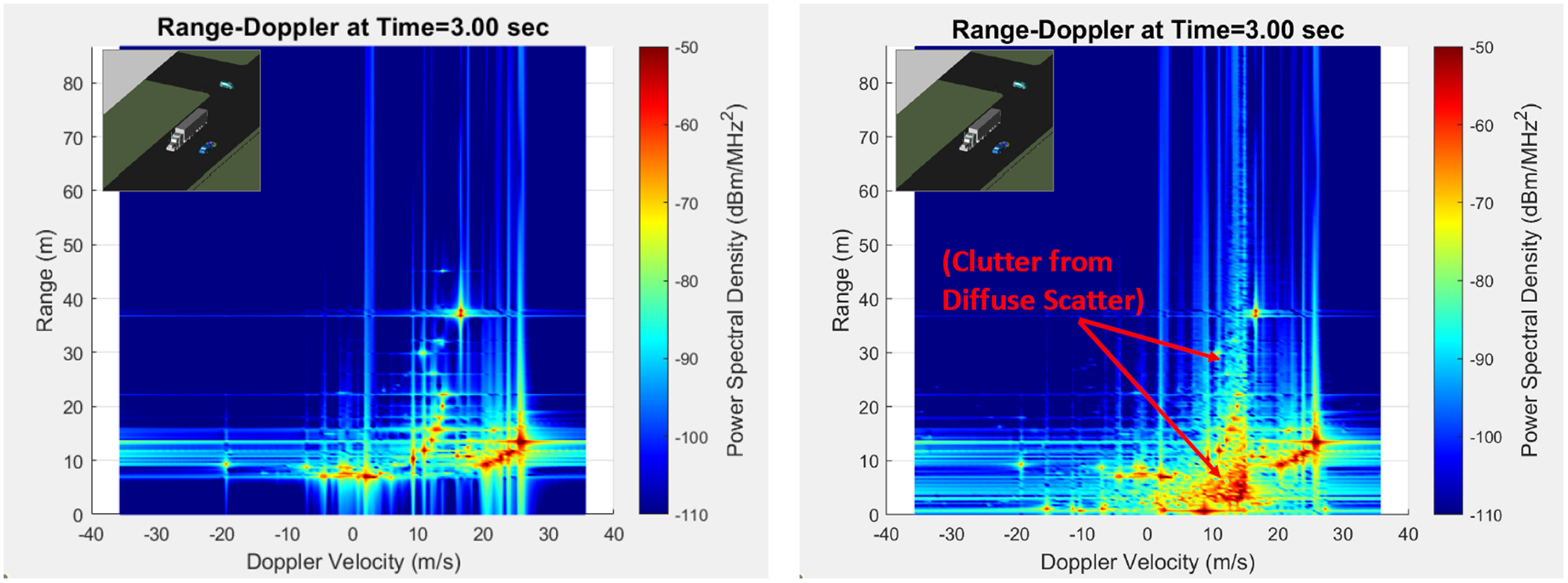
- 以下では道路に拡散散乱モデルを適用することで、レンジ・ドップラープロットへの道路粗さによる拡散散乱のクラッタの影響を評価する。
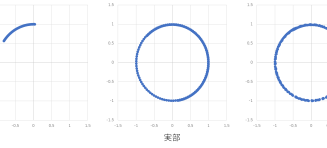
- 下図に初期時刻から3秒後の拡散散乱なし/ありの複素インパルス応答(左図)及びマルチパス状況(右図)を示す。道路の拡散散乱によるクラッタの影響が見られる。
- 下図に初期時刻から3秒後の拡散散乱なし/ありのレンジ・ドップラープロットを示す。道路の拡散散乱によるクラッタの影響が広範囲で見られる。
MIMOレーダーによる距離・角度検出結果
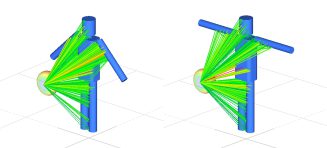
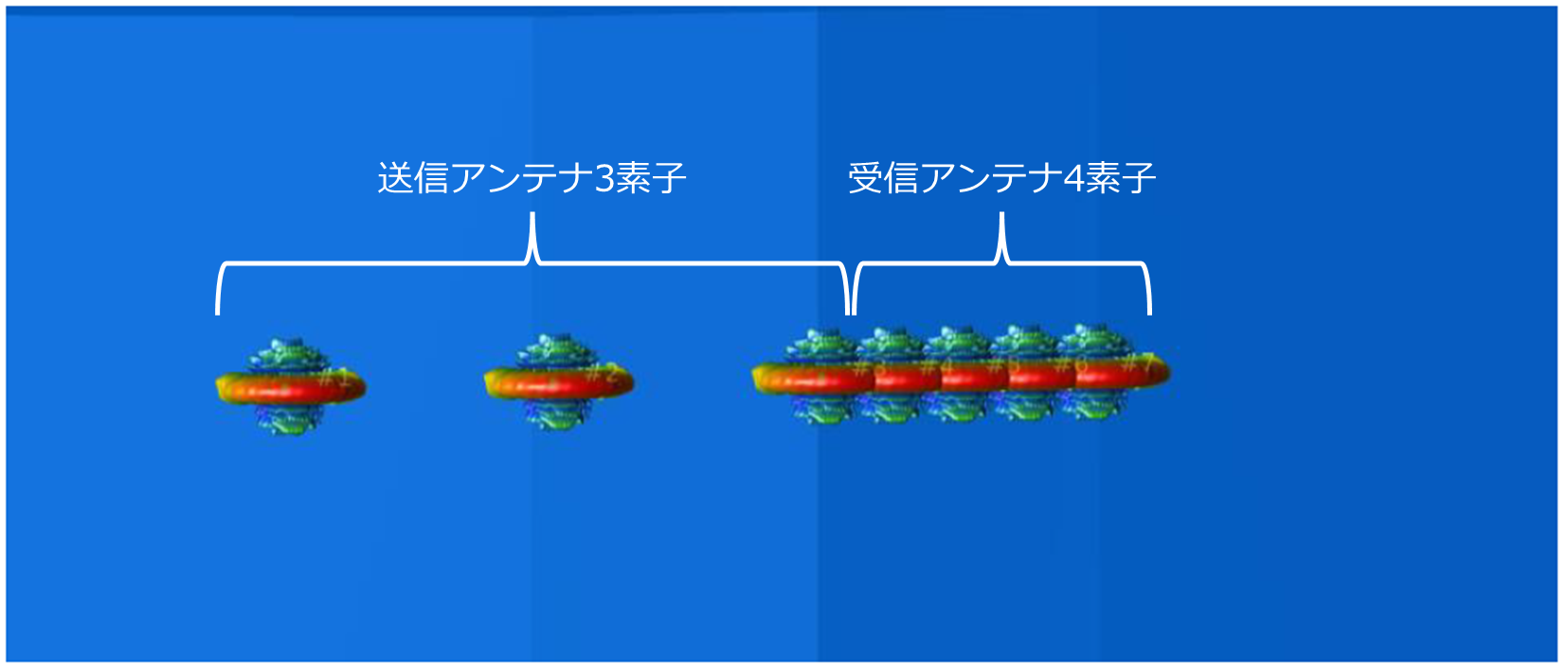
- 下図のような3素子の送信アンテナ、4素子の受信アンテナを持つMIMOレーダーを使用して、レンジ・アングルプロットを計算する。
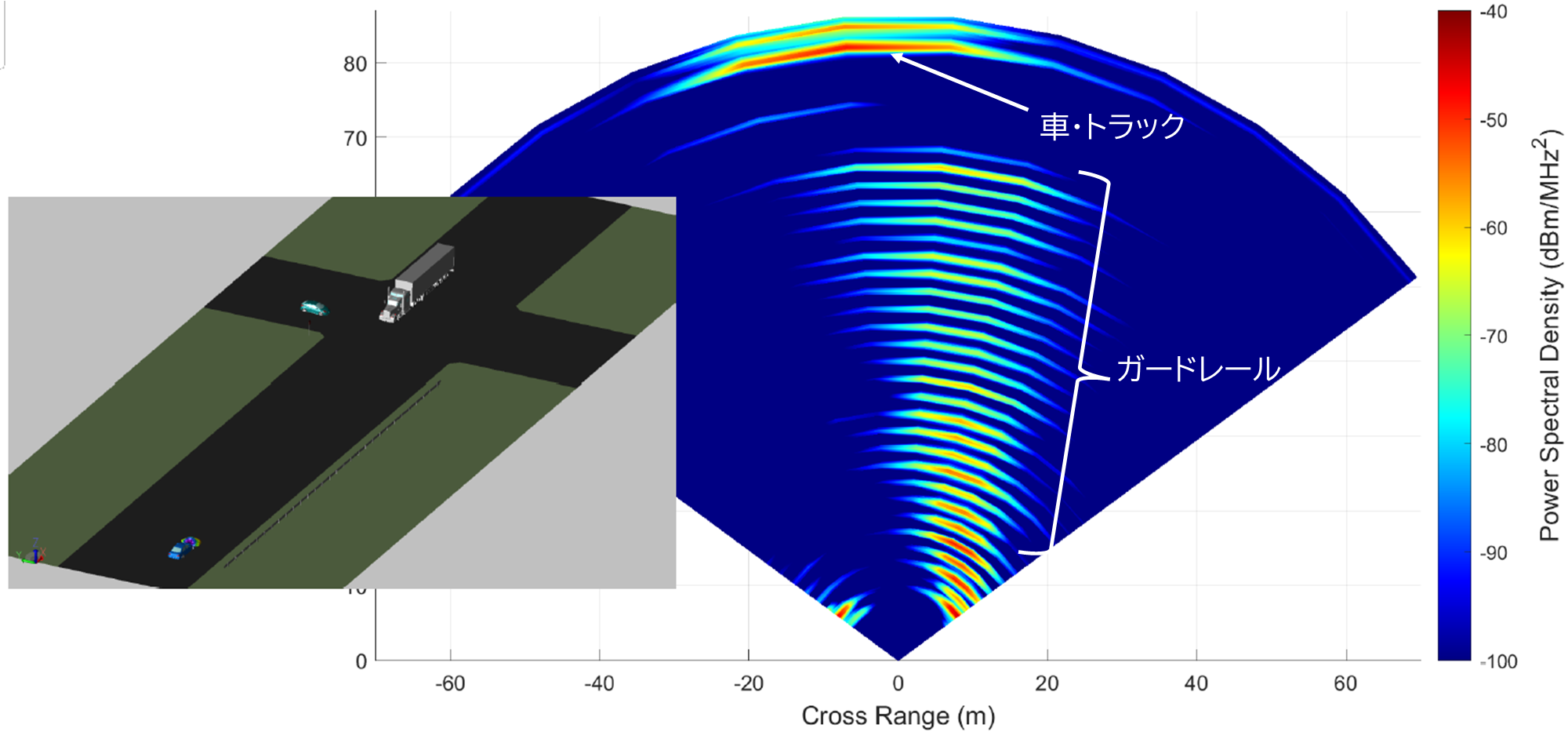
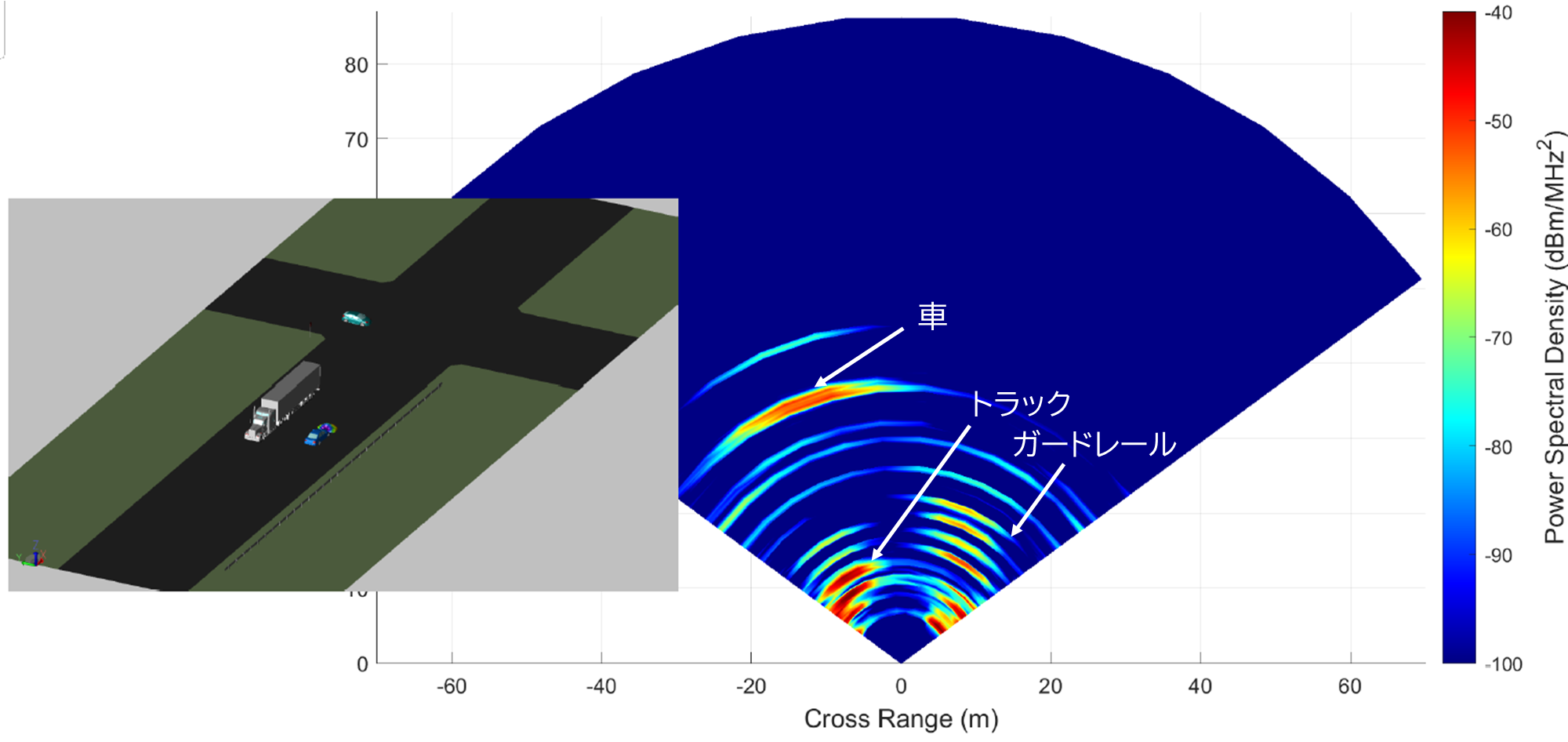
- 下図に初期時刻(0秒)と3秒後のレンジ・アングルプロットを示す。各時刻における対向車(トラック)、車(ハッチバック)、ガードレールまでの距離と角度(クロスレンジ距離)が検出できている。
まとめ
- ミリ波レーダー解析ツール WaveFarerを使用して、自動車走行シナリオにおけるFMCWレーダーによるレンジ・ドップラープロット及びMIMOレーダーによるレンジ・アングルプロットを計算し、距離・相対速度・角度を検出した。
- 本稿はRemcom社のWebサイトにある以下の論文をもとに作成した。
Auto-Radar Drive Scenario Simulation: Increasing Realism with Multipath, Diffuse Scattering, and Micro-Doppler